Découvrez comment Englab développe un contrôleur prédictif modèle (MPC) permettant aux véhicules tout-terrain autonomes de naviguer en toute sécurité sur des terrains complexes et non structurés.

Les technologies autonomes transforment rapidement un large éventail de applications tout-terrain, de l'agriculture et de la sylviculture à la défense, à la construction et à l'entretien des routes, offrant de nouvelles façons d'améliorer efficacité et sécurité dans des environnements difficiles. Chez T&S, L'équipe Englab dirige un projet de R&D axé sur le développement d'un Contrôleur prédictif de modèle (MPC) qui aide les véhicules tout-terrain autonomes à suivre des trajectoires précises tout en réagissant en toute sécurité aux obstacles sur des terrains complexes et non structurés.
S'appuyant sur des travaux antérieurs en matière de perception et de modélisation des véhicules, le contrôleur exploite rLiDAR et données de caméra en temps réel avec optimisation prédictive pour s'adapter à terrain changeant et types de capteurs. En combinant la perception, la modélisation et le contrôle, le système permet au véhicule d'anticiper les obstacles et d'ajuster ses mouvements de manière proactive.
Ce projet s'inscrit dans le cadre de nos efforts plus vastes visant à faire progresser la navigation hors route autonome, en jetant les bases des innovations futures en matière de fusion multi-capteurs, de stratégies de contrôle prédictif et de systèmes intelligents dans divers domaines hors route.
De nombreuses approches de contrôle ont été explorées en robotique, chacune offrant des compromis différents en termes de performances, de coût de calcul et d'interprétabilité. Notre approche repose sur Contrôleur prédictif de modèle (MPC), qui prédit en permanence le mouvement du véhicule et le comportement des obstacles à proximité sur un horizon court. En optimisant la direction et la vitesse à chaque étape, le contrôleur permet au véhicule de réagir en douceur et en toute sécurité à son environnement changeant.

Ce projet fait également face à plusieurs principaux défis typique des systèmes autonomes tout-terrain : garantir une temps d'exécution très rapide, en trouvant les bons compromis entre horizon de prévision et commandes de contrôle, et en sélectionnant les éléments appropriés durées d'échantillonnage pour maintenir les deux précision et performance. L'équilibre entre ces facteurs est essentiel pour atteindre un contrôleur fiable et réactif capable de fonctionner dans des environnements complexes et non structurés.
Le contrôleur est construit à l'aide du acados bibliothèque d'optimisation, avec des paramètres définis en Python et une intégration gérée via C/C++ dans le ROS cadre. Cette combinaison fournit une efficacité de calcul en temps réel tout en préservant la flexibilité du système pour les tests et les réglages.

Ses performances ont été évaluées dans simulation, couvrant une gamme de scénarios tels que des obstacles de grande taille, des déviations dynamiques de trajectoire et des conditions de terrain variables. Ces simulations permettent de tester de manière systématique les précision du suivi des trajectoires, capacités d'évitement d'obstacles, et stabilité dans des conditions opérationnelles réalistes.
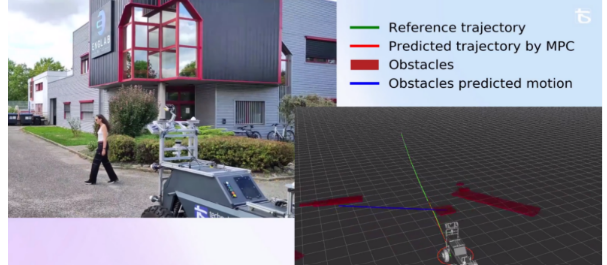
Pour voir comment notre contrôleur effectue une simulation extérieure, nous l'avons emmené sur un parking, un terrain d'essai simple mais animé avec des voitures en stationnement, des véhicules en mouvement et quelques piétons curieux. Cette configuration nous a donné le mélange parfait de prévisibilité et de surprise pour tester la réaction du MPC en temps réel, en ajustant sa trajectoire en douceur tout en restant à une distance de sécurité des obstacles.
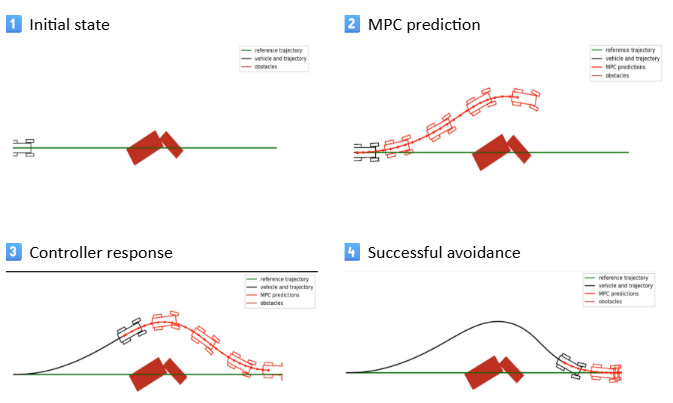
Nous avons d'abord testé le contrôleur sur notre robot avec des obstacles fixes. La ligne verte représente la trajectoire de référence, tandis que les obstacles détectés apparaissent sous forme de rectangles rouges. Le MPC traite la situation comme un problème d'optimisation, en prédisant la trajectoire du robot (en rouge) dans quelques secondes pour contourner les obstacles en toute sécurité.

Ensuite, nous avons mis le système au défi avec des obstacles mobiles. En prédisant la façon dont les objets environnants se déplaceront, le contrôleur ajuste sa trajectoire de manière proactive, évitant ainsi les collisions tout en gardant le cap.
Enfin, nous avons testé des manœuvres plus complexes, notamment la marche arrière pour revenir sur la trajectoire prévue. Même dans ces situations délicates, le MPC guide le robot de manière sûre et efficace, démontrant ainsi sa capacité à gérer des scénarios de stationnement réalistes.

Lors de tests de simulation et dans le monde réel, le MPC a constamment guidé le robot autour d'obstacles statiques et dynamiques, en maintenant suivi précis de la trajectoire, et géré manœuvres complexes comme faire marche arrière dans des espaces restreints.
Dans l'ensemble, Le Model Predictive Control permet aux robots de naviguer dans des environnements complexes de manière sûre et efficace, combinant planification prédictive et réactivité en temps réel face à l'évolution des conditions.
L'objectif suivant est d'intégrer le MPC à Cartes 2D qui fournissent une indice de traversabilité pour chaque zone située devant le véhicule, améliorant ainsi la planification des trajectoires et l'évitement des obstacles sur les terrains non structurés.





Un contrôleur prédictif de modèle (MPC) est un algorithme de contrôle avancé qui prédit en permanence les mouvements futurs d'un véhicule et ajuste la direction et la vitesse en temps réel. Dans les environnements tout-terrain, il utilise les données de capteurs tels que le LiDAR et les caméras pour anticiper les obstacles et planifier des trajectoires sûres et efficaces, même sur des terrains non structurés.
Les principaux défis consistent à garantir des performances en temps réel, à sélectionner le bon horizon de prédiction et à trouver un équilibre entre précision et efficacité informatique. Les conditions hors route ajoutent à la complexité en raison du terrain accidenté, des obstacles imprévisibles et de la qualité variable des données des capteurs.
L'équipe d'Englab évalue le contrôleur à la fois par le biais de simulations et de tests réels, y compris des manœuvres d'évitement d'obstacles statiques et dynamiques et des manœuvres de marche arrière. Ces essais confirment la capacité du MPC à assurer un suivi précis de la trajectoire, une gestion sûre des obstacles et des performances fiables dans des scénarios tout-terrain réalistes.


Les femmes dans l'industrie, le leadership et la diversité : découvrez comment la technologie et la stratégie favorisent l'inclusion et soutiennent les carrières des femmes dans le secteur industriel.
EN SAVOIR PLUS
T&S a développé SIRIUS pour Cryostar, augmentant ainsi la productivité ITP/QCDB, réduisant les erreurs de 80 % et éliminant la dépendance vis-à-vis des fournisseurs.
EN SAVOIR PLUS
Renforcez la sécurité de Embedded Linux grâce aux meilleures pratiques telles que la réduction de la surface d'attaque, le contrôle d'accès et la sécurité dès la conception. Découvrez comment Technology & Strategy aide les entreprises à créer des systèmes résilients et sécurisés.
EN SAVOIR PLUS





