Notre équipe de recherche et d'innovation, en lien étroit avec Englab, joue un rôle moteur dans la robotique autonome tout-terrain et l'industrie 5.0.
Notre engagement en faveur de l'innovation s'appuie sur notre expertise technique solide, nous permettant de répondre aux besoins changeants de nos clients et aux tendances du secteur.
Nous travaillons activement à la maîtrise des technologies de pointe pour anticiper les défis à venir et répondre aux attentes spécifiques de chaque client. Cette capacité d’anticipation nous permet de proposer des solutions innovantes, adaptées aux usages et aux dynamiques du marché.
Notre équipe pluridisciplinaire dépasse les frontières traditionnelles du marché en explorant de nouveaux territoires et en développant des partenariats pour élargir notre champ d'action.
Ce qui nous distingue, c'est notre capacité à faire le lien entre la recherche appliquée et les besoins concrets du terrain, en transformant les innovations de rupture en solutions pratiques, génératrices de valeur pour nos clients et porteuses de transformation pour le secteur.






















Notre équipe d'experts a été créée pour révolutionner votre secteur d'activité.
En mettant l'accent sur la mobilité autonome et Industrie 5.0, nous nous engageons à fournir des solutions de pointe qui répondent à vos défis uniques. Notre engagement en faveur de l'innovation nous permet de repousser sans cesse les limites du possible, afin que vous restiez à la pointe de votre secteur.
Nos experts vous apporteront une assistance tout au long des différentes phases des technologies que vous développez et peuvent bénéficier de tous les centres de compétences du groupe T&S.
Associez-vous à notre centre de R&D et redéfinissons ensemble ce qui est possible !







Partagez vos enjeux, nous co-construisons la solution adaptée.
Nous contacter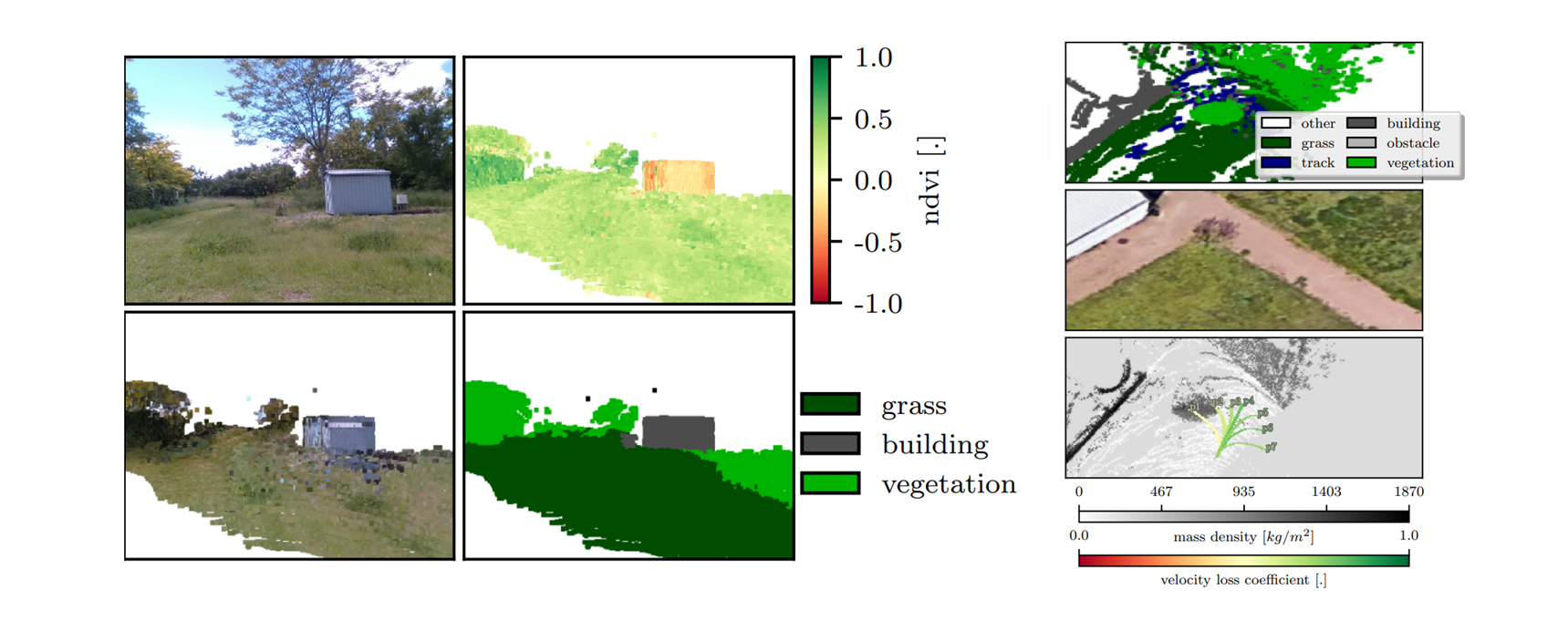
Pour relever le défi de la traversabilité des véhicules tout-terrain dans des environnements à végétation dense tels que les vergers, les vignobles et les forêts, nous explorons le potentiel d'une caméra multispectrale. Les données fournies dans le proche infrarouge ouvrent la voie à de nouvelles approches scientifiques basées sur les émissions spectrales de la végétation. Les premiers résultats de nos travaux sont décrits dans cet article.

Cet article présente une nouvelle approche hybride (H-CCPP) pour optimiser la planification de la trajectoire de couverture pour les robots agricoles. Contrairement aux méthodes précédentes, le H-CCPP améliore la vitesse de traitement, explore diverses directions de conduite et intègre des modèles de saut de ligne pour les champs simples et complexes. Il détermine automatiquement les points d'entrée et de sortie et a été rigoureusement évalué sur un ensemble de données de 30 champs français, démontrant des performances supérieures en matière de réduction des coûts de pente tout en maintenant l'efficacité d'autres indicateurs clés. Les recherches futures se concentreront sur l'amélioration de la couverture des promontoires, l'intégration d'expériences réelles, la gestion des obstacles et l'optimisation de la coordination multirobots.

L'article explore les méthodes permettant d'améliorer la maintenance prédictive en améliorant la préparation des données pour les prévisions de durée de vie utile restante (RUL). L'étude compare l'approche traditionnelle de « plafonnement », qui limite les valeurs RUL, à une nouvelle méthode de « filtrage » qui se concentre exclusivement sur les données de la phase de dégradation, à l'exclusion des données de fonctionnement normal. Alors que le plafonnement réduit les erreurs pendant la phase de fonctionnement normal, il fausse les prévisions pendant la phase de dégradation. En revanche, l'approche de filtrage améliore la précision en entraînant le modèle uniquement sur les données de dégradation, ce qui permet d'obtenir des estimations RUL plus précises. Les résultats soulignent l'importance de sélectionner des données pertinentes pour améliorer les performances et la fiabilité des modèles de maintenance prédictive.