Discover how Englab develops a Model Predictive Controller (MPC) enabling autonomous off-road vehicles to navigate safely in complex, unstructured terrains.

Autonomous technologies are rapidly transforming a wide range of off-road applications, from agriculture and forestry to defense, construction, and road maintenance, offering new ways to improve efficiency and safety in challenging environments. At T&S, the Englab team is leading an R&D project focused on developing a Model Predictive Controller (MPC) that helps autonomous off-road vehicles follow precise paths while safely reacting to obstacles in complex, unstructured terrain.
Building on previous work in perception and vehicle modeling, the controller leverages real-time LiDAR and camera data together with predictive optimization to adapt to changing terrain and sensor types. By combining perception, modeling, and control, the system enables the vehicle to anticipate obstacles and adjust its motion proactively.
This project is part of our broader effort to advance autonomous off-road navigation, laying the groundwork for future innovations in multi-sensor fusion, predictive control strategies, and intelligent systems across a variety of off-road domains.
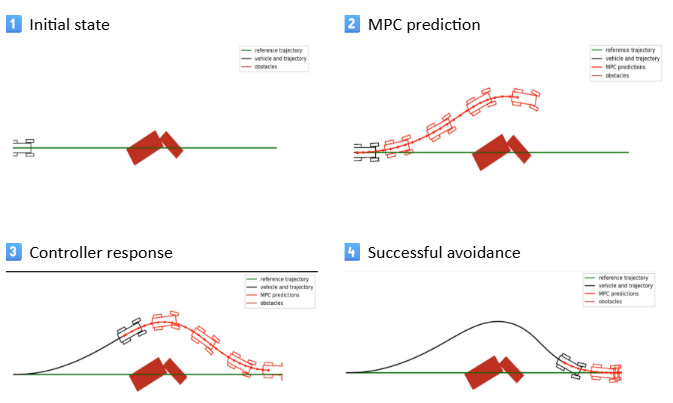
Many control approaches have been explored in robotics, each offering different trade-offs in terms of performance, computational cost, and interpretability. Our approach relies on a Model Predictive Controller (MPC), which continuously predicts the vehicle’s motion and the behavior of nearby obstacles over a short horizon. By optimizing steering and velocity at each step, the controller enables the vehicle to react smoothly and safely to its changing environment.

This project also faces several key challenges typical of off-road autonomous systems: ensuring a very fast execution time, finding the right trade-offs between prediction horizon and control commands, and selecting appropriate sampling durations to maintain both precision and performance. Balancing these factors is crucial to achieving a reliable, responsive controller capable of operating in complex, unstructured environments.
The controller is built using the acados optimization library, with parameters defined in Python and integration handled through C/C++ within the ROS framework. This combination provides real-time computational efficiency while keeping the system flexible for testing and fine-tuning.

Its performance has been evaluated in simulation, covering a range of scenarios such as wide obstacles, dynamic path deviations, and varying terrain conditions. These simulations allow systematic testing of the controller’s trajectory tracking accuracy, obstacle avoidance capabilities, and stability under realistic operational constraints.
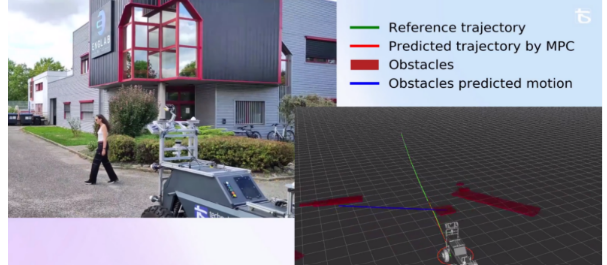
To see how our controller performs outside simulation, we took it to a parking lot — a simple but lively test ground with parked cars, moving vehicles, and a few curious pedestrians. This setup gave us the perfect mix of predictability and surprise to test how the MPC reacts in real time, adjusting its trajectory smoothly while keeping a safe distance from obstacles.
We first tested the controller on our robot with stationary obstacles. The green line represents the reference trajectory, while detected obstacles appear as red rectangles. The MPC treats the situation as an optimization problem, predicting the robot’s path (shown in red) several seconds into the future to navigate safely around obstacles.

Next, we challenged the system with moving obstacles. By predicting how surrounding objects will move, the controller adjusts its trajectory proactively, smoothly avoiding collisions while staying on course.
Finally, we tested more complex maneuvers, including reversing to get back on the planned trajectory. Even in these tricky situations, the MPC guides the robot safely and efficiently, demonstrating its ability to handle realistic parking scenarios.

Across both simulation and real-world tests, the MPC consistently guided the robot around static and dynamic obstacles, maintained accurate trajectory tracking, and handled complex maneuvers like reversing in tight spaces.
Overall, Model Predictive Control enables robots to navigate complex environments safely and efficiently, combining predictive planning with real-time responsiveness to changing conditions.
The next objective is to integrate the MPC with 2D maps that provide a traversability index for each area in front of the vehicle, further improving path planning and obstacle avoidance in unstructured terrains.





A Model Predictive Controller (MPC) is an advanced control algorithm that continuously predicts a vehicle’s future motion and adjusts steering and speed in real time. In off-road environments, it uses sensor data such as LiDAR and cameras to anticipate obstacles and plan safe, efficient trajectories even in unstructured terrains.
Key challenges include ensuring real-time performance, selecting the right prediction horizon, and balancing precision with computational efficiency. Off-road conditions add complexity due to uneven terrain, unpredictable obstacles, and varying sensor data quality.
The Englab team evaluates the controller through both simulation and real-world tests — including static and dynamic obstacle avoidance and reversing maneuvers. These trials confirm the MPC’s ability to ensure accurate trajectory tracking, safe obstacle handling, and reliable performance in realistic off-road scenarios.


Women in industry, leadership, and diversity: discover how Technology & Strategy drives inclusion and supports women’s careers in the industrial sector.
READ MORE
T&S developed SIRIUS for Cryostar, boosting ITP/QCDB productivity, reducing errors by 80% and eliminating vendor dependency.
READ MORE
Strengthen Embedded Linux security with best practices like attack surface reduction, access control, and security by design. Discover how Technology & Strategy helps organizations build resilient, secure systems.
READ MORE





