In short:
Um der Herausforderung der Durchfahrbarkeit von Geländefahrzeugen durch dicht bewachsene Umgebungen wie Obstgärten, Weinberge und Wälder zu begegnen, untersuchen wir das Potenzial einer Multispektralkamera. Die Daten, die im nahen Infrarotbereich zur Verfügung gestellt werden, öffnen die Tür zu neuen wissenschaftlichen Ansätzen, die auf den spektralen Emissionen der Vegetation basieren. Die ersten Ergebnisse unserer Arbeit werden in diesem Artikel beschrieben.
Abstract:
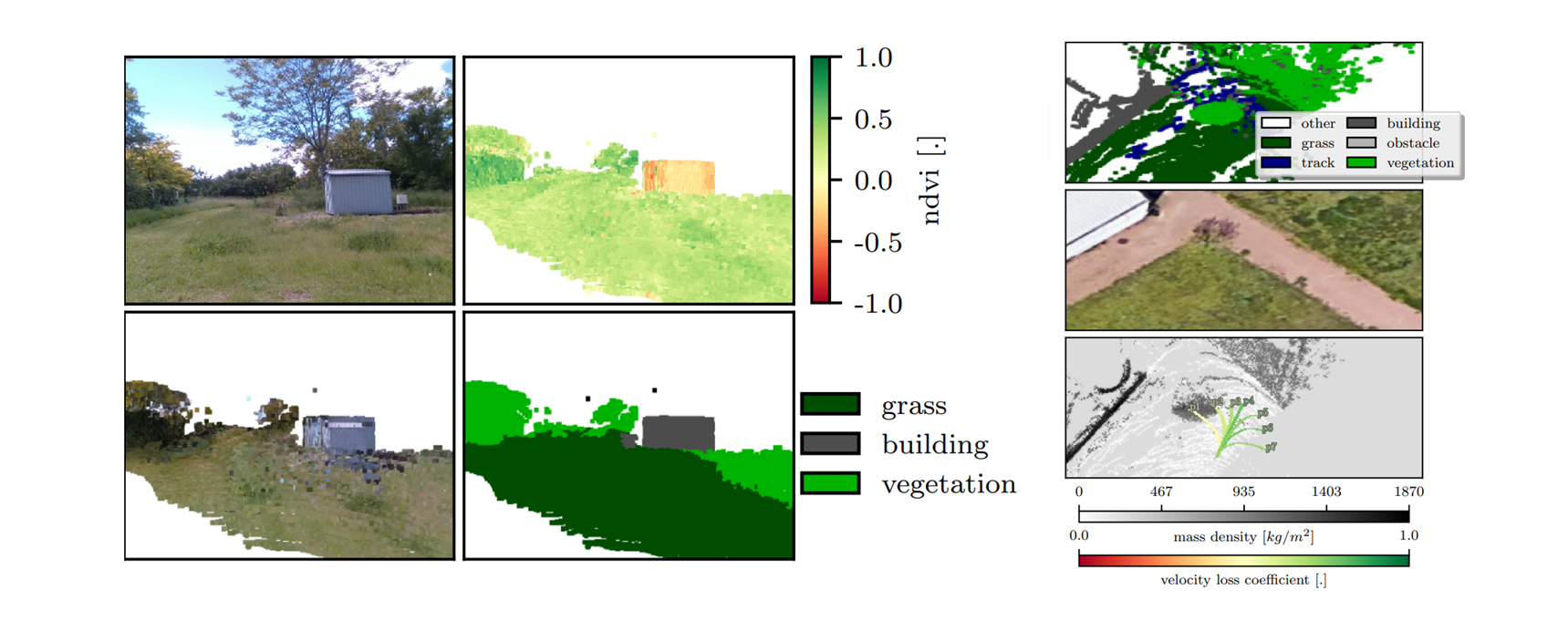
In diesem Artikel stellen wir eine neuartige Methode zur sicheren Navigation in der Agrarrobotik vor. Angesichts der zunehmenden globalen Umweltprobleme bietet die Robotik eine leistungsstarke Lösung, um den Einsatz von Chemikalien zu reduzieren und gleichzeitig den steigenden Anforderungen an die Lebensmittelproduktion gerecht zu werden. Allerdings bestehen nach wie vor erhebliche Herausforderungen, wenn es darum geht, die Autonomie und Widerstandsfähigkeit von Robotern sicherzustellen, die in unstrukturierten landwirtschaftlichen Umgebungen eingesetzt werden. Hindernisse wie Feldfrüchte und hohes Gras, die verformbar sind, müssen im Vergleich zu starren Hindernissen als sicher überwindbar eingestuft werden. Um diesem Problem zu begegnen, schlagen wir eine neue Methode zur Analyse der Durchlassfähigkeit vor, die auf einer 3D-Spektralkarte basiert, die mit einem LIDAR und einer Multispektralkamera rekonstruiert wurde. Dieser Ansatz ermöglicht es dem Roboter, zwischen sicheren und unsicheren Kollisionen mit verformbaren Hindernissen zu unterscheiden. Wir führen eine umfassende Bewertung der multispektralen Metriken für die Vegetationserkennung durch und integrieren diese Metriken in eine erweiterte Umweltkarte. Anhand dieser Karte berechnen wir eine physikalisch fundierte Kennzahl zur Durchfahrbarkeit, die das Gewicht und die Größe des Roboters berücksichtigt und so eine sichere Navigation über verformbare Hindernisse gewährleistet.