Unser Forschungs- und Innovationsteam, das tief in Englab integriert ist, ist eine treibende Kraft in den Bereichen autonome Offroad-Robotik und Industrie 5.0.
Unser Engagement für Innovation verbindet sich mit unserem technischen Fachwissen und treibt uns an, den sich ändernden Bedürfnissen unserer Kunden und Branchentrends gerecht zu werden.
Wir widmen uns unermüdlich der souveränen Handhabung modernster Technologien, um zukünftige Herausforderungen zu antizipieren und die Wünsche jedes einzelnen Kunden zu erfüllen. Diese Weitsicht ermöglicht es uns, innovative Lösungen anzubieten, die sich nahtlos in die sich entwickelnden Geschäftspraktiken integrieren.
Unser multidisziplinäres Team überschreitet traditionelle Marktgrenzen, erkundet neue Grenzen und geht Partnerschaften ein, um unsere Reichweite zu erweitern.
Unser Markenzeichen ist es, die Lücke zwischen angewandter Forschung und Marktbedürfnissen zu schließen und disruptive Innovationen in praktische Lösungen umzusetzen, die reale Herausforderungen angehen, indem sie den Wert für unsere Kunden steigern und die Zukunft ihrer Branche gestalten.






















Unser Expertenteam wurde gegründet, um Ihre Branche zu revolutionieren.
Mit dem Fokus auf Autonome Mobilität und Industrie 5.0, sind wir bestrebt, innovative Lösungen zu liefern, die Ihren individuellen Herausforderungen gerecht werden. Unser Engagement für Innovation ermöglicht es uns, die Grenzen des Machbaren kontinuierlich zu erweitern und sicherzustellen, dass Sie in Ihrer Branche an der Spitze bleiben.
Unsere Experten unterstützen Sie in mehreren Phasen der Technologien, die Sie entwickeln, und können von allen Kompetenzzentren der T&S-Gruppe profitieren.
Arbeiten Sie mit unserem Forschungs- und Entwicklungszentrum zusammen und lassen Sie uns gemeinsam neu definieren, was möglich ist!







Stellen Sie Ihre Fragen und finden Sie Lösungen für Ihre Produktentwicklung
Kontaktieren Sie uns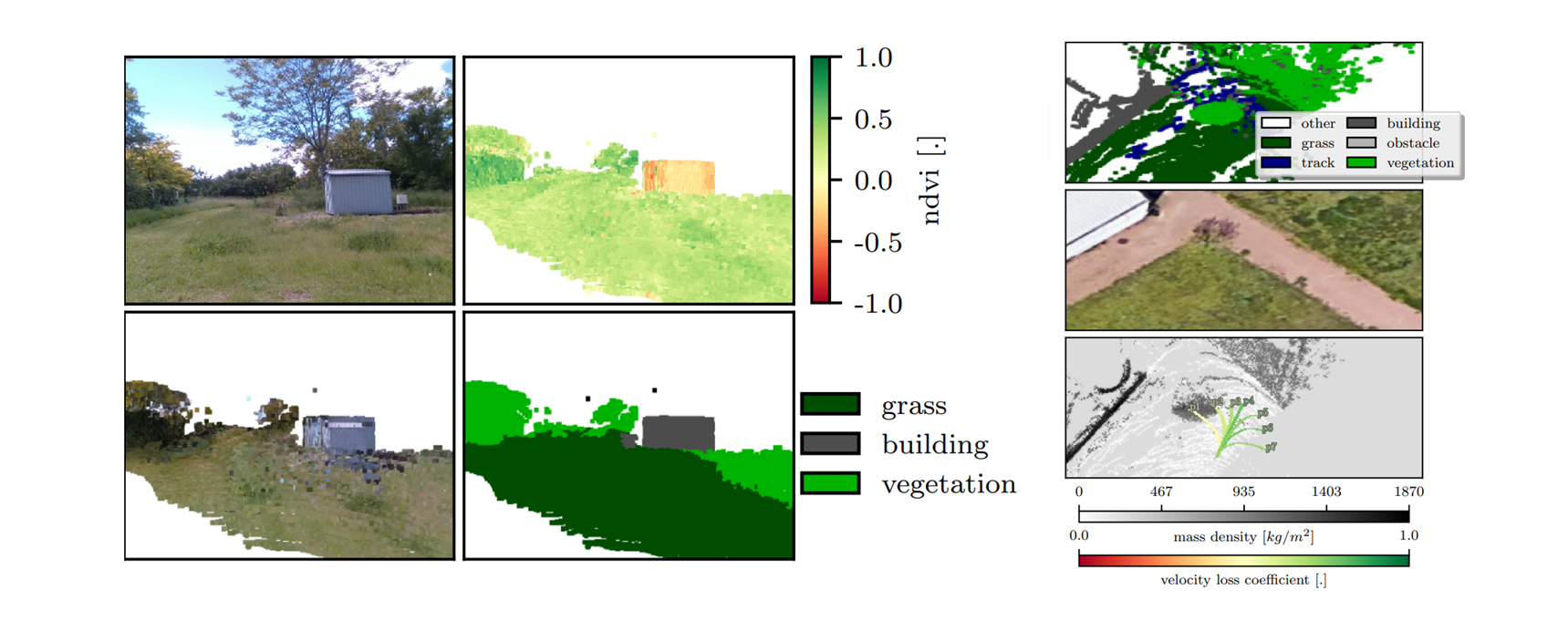
Um der Herausforderung der Durchfahrbarkeit von Geländefahrzeugen durch dicht bewachsene Umgebungen wie Obstgärten, Weinberge und Wälder zu begegnen, untersuchen wir das Potenzial einer Multispektralkamera. Die Daten, die im nahen Infrarotbereich zur Verfügung gestellt werden, öffnen die Tür zu neuen wissenschaftlichen Ansätzen, die auf den spektralen Emissionen der Vegetation basieren. Die ersten Ergebnisse unserer Arbeit werden in diesem Artikel beschrieben.

In diesem Artikel wird ein neuer Hybridansatz (H-CCPP) zur Optimierung der Pfadplanung für Agrarroboter vorgestellt. Im Gegensatz zu früheren Methoden verbessert H-CCPP die Verarbeitungsgeschwindigkeit, untersucht verschiedene Fahrtrichtungen und integriert Muster zum Überspringen von Zeilen sowohl für einfache als auch für komplexe Felder. Es bestimmt automatisch Ein- und Ausstiegspunkte und wurde anhand eines Datensatzes von 30 französischen Feldern rigoros evaluiert. Es zeigte eine überragende Leistung bei der Minimierung der Steigungskosten bei gleichzeitiger Aufrechterhaltung der Effizienz bei anderen wichtigen Kennzahlen. Künftige Forschungsarbeiten werden sich auf die Verbesserung der Landzungenabdeckung, die Integration realer Experimente, den Umgang mit Hindernissen und die Optimierung der Koordination mehrerer Roboter konzentrieren.

In dem Artikel werden Methoden zur Verbesserung der vorausschauenden Wartung untersucht, indem die Datenaufbereitung für Prognosen zur verbleibenden Nutzungsdauer (RUL) verbessert wird. In der Studie wird das traditionelle „Capping“ -Konzept, bei dem die RUL-Werte begrenzt werden, mit einer neuen „Filtermethode“ verglichen, die sich ausschließlich auf Daten aus der Degradationsphase konzentriert, mit Ausnahme der normalen Betriebsdaten. Das Capping reduziert zwar Fehler in der normalen Betriebsphase, verzerrt aber die Vorhersagen während der Degradationsphase. Im Gegensatz dazu verbessert der Filteransatz die Genauigkeit, da das Modell ausschließlich anhand von Degradationsdaten trainiert wird, was zu genaueren RUL-Schätzungen führt. Die Ergebnisse unterstreichen, wie wichtig es ist, relevante Daten auszuwählen, um die Leistung und Zuverlässigkeit von Modellen für die vorausschauende Wartung zu verbessern.