En bref :
Pour relever le défi de la traversabilité des véhicules tout-terrain dans des environnements à végétation dense tels que les vergers, les vignobles et les forêts, nous explorons le potentiel d'une caméra multispectrale. Les données fournies dans le proche infrarouge ouvrent la voie à de nouvelles approches scientifiques basées sur les émissions spectrales de la végétation. Les premiers résultats de nos travaux sont décrits dans cet article.
Résumé :
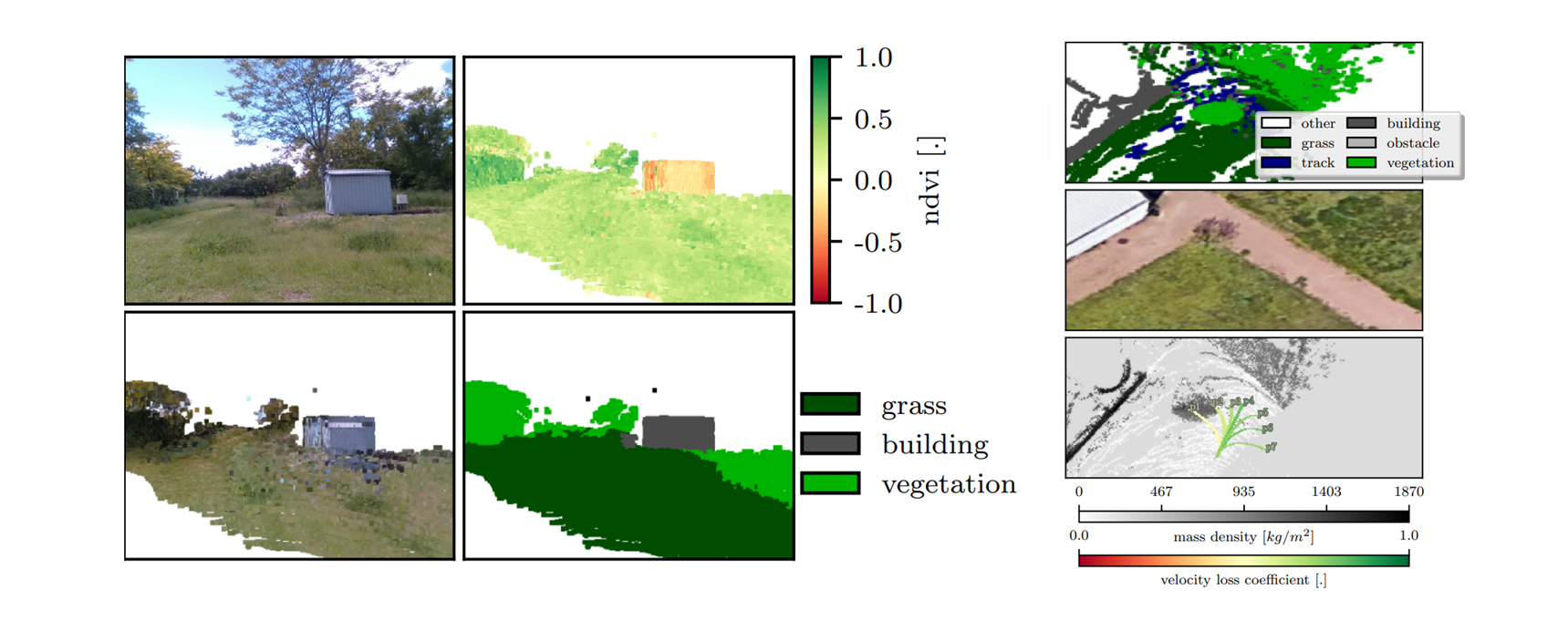
Dans cet article, nous présentons une nouvelle méthode pour une navigation sûre en robotique agricole. Alors que les défis environnementaux mondiaux s'intensifient, la robotique offre une solution puissante pour réduire l'utilisation de produits chimiques tout en répondant à la demande croissante en matière de production alimentaire. Cependant, des défis importants restent à relever pour garantir l'autonomie et la résilience des robots opérant dans des environnements agricoles non structurés. Les obstacles tels que les cultures et les hautes herbes, qui sont déformables, doivent être identifiés comme étant franchissables en toute sécurité, par rapport aux obstacles rigides. Pour y remédier, nous proposons une nouvelle méthode d'analyse de traversabilité basée sur une carte spectrale 3D reconstruite à l'aide d'un LIDAR et d'une caméra multispectrale. Cette approche permet au robot de faire la distinction entre des collisions sûres et dangereuses avec des obstacles déformables. Nous effectuons une évaluation complète des métriques multispectrales pour la détection de la végétation et intégrons ces métriques dans une carte environnementale augmentée. À l'aide de cette carte, nous calculons une métrique de traversabilité basée sur la physique qui tient compte du poids et de la taille du robot, garantissant ainsi une navigation sûre au-dessus d'obstacles déformables.




