Our research and innovation team, deeply integrated in Englab, is a driving force in Off-Road Autonomous Robotics and Industry 5.0.
Our commitment to innovation fuses with our technical expertise, propelling us to meet the evolving needs of our customers and industry trends.
We tirelessly dedicate ourselves to mastering cutting-edge technologies to anticipate future challenges and help fulfill the aspirations of each and every client. This foresight enables us to deliver innovative solutions that seamlessly integrate with evolving business practices.
Our multidisciplinary team transcends traditional market boundaries, exploring new frontiers and forging partnerships to expand our reach.
Our hallmark is bridging the gap between applied research and market needs, translating disruptive innovation into practical solutions that address real-world challenges by driving value for our customers and shaping the future of their industry.




















Our expert team was built to revolutionize your industry.
With a focus on Autonomous Mobility and Industry 5.0, we are dedicated to delivering cutting-edge solutions that address your unique challenges. Our commitment to innovation allows us to continuously push the boundaries of what's possible, ensuring you remain at the forefront of your industry.
Our experts will provide you with support across multiple phases of the technologies you are developing, and can benefit from all the competencies centers of the T&S group.
Partner with our R&D Center and let's redefine what's possible together!







Ask your questions and find solutions for your product development
Contact us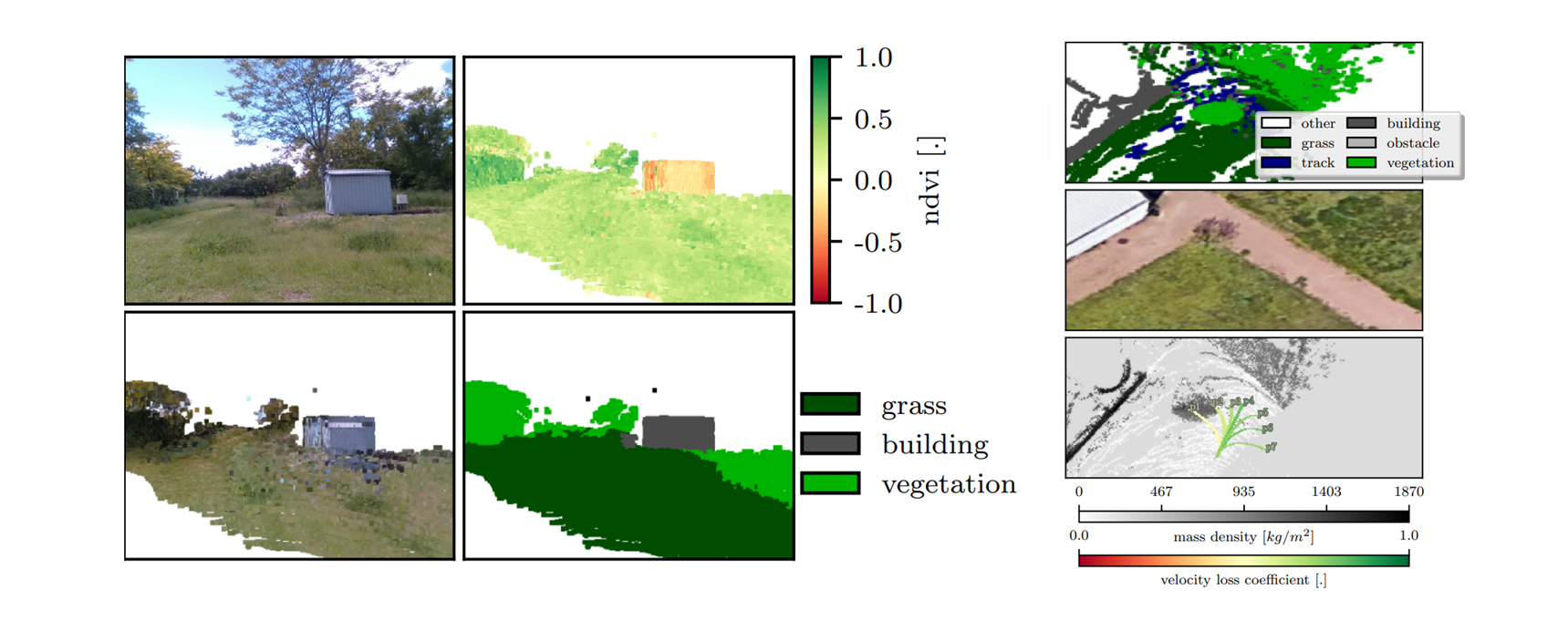
To address the challenge of off-road vehicle traversability through dense vegetated environments such as orchards, vineyards, and forests, we explore the potential of a multispectral camera. The data provided in the near-infrared wavelengths open the door to new scientific approaches based on the spectral emissions of vegetation. The initial results of our work are described in this article.

This article presents a new hybrid approach (H-CCPP) for optimizing coverage path planning for agricultural robots. Unlike previous methods, H-CCPP improves processing speed, explores diverse driving directions, and integrates row-skip patterns for both simple and complex fields. It automatically determines entry and exit points and was rigorously evaluated on a dataset of 30 French fields, showing superior performance in minimizing slope costs while maintaining efficiency in other key metrics. Future research will focus on improving headland coverage, integrating real-world experiments, handling obstacles, and optimizing multirobot coordination.

The article explores methods to improve predictive maintenance by enhancing data preparation for Remaining Useful Life (RUL) predictions. The study compares the traditional "capping" approach, which limits RUL values, with a new "filtering" method that focuses exclusively on data from the degradation phase, excluding normal operation data. While capping reduces errors in the normal operation phase, it distorts predictions during the degradation phase. In contrast, the filtering approach improves accuracy by training the model solely on degradation data, resulting in more precise RUL estimates. The findings highlight the importance of selecting relevant data to improve the performance and reliability of predictive maintenance models.